
使用 Simulink 和 Stateflow 创建基于 Arduino 的机器人蜘蛛
此仿真模型是使用 Simulink 和 Stateflow 创建基于 Arduino 的机器人蜘蛛。
此文档包含构建您自己的机器人蜘蛛所需的文件。
预览截图
应用介绍
此仿真模型是使用 Simulink 和 Stateflow 创建基于 Arduino 的机器人蜘蛛。
此文档包含构建您自己的机器人蜘蛛所需的文件。
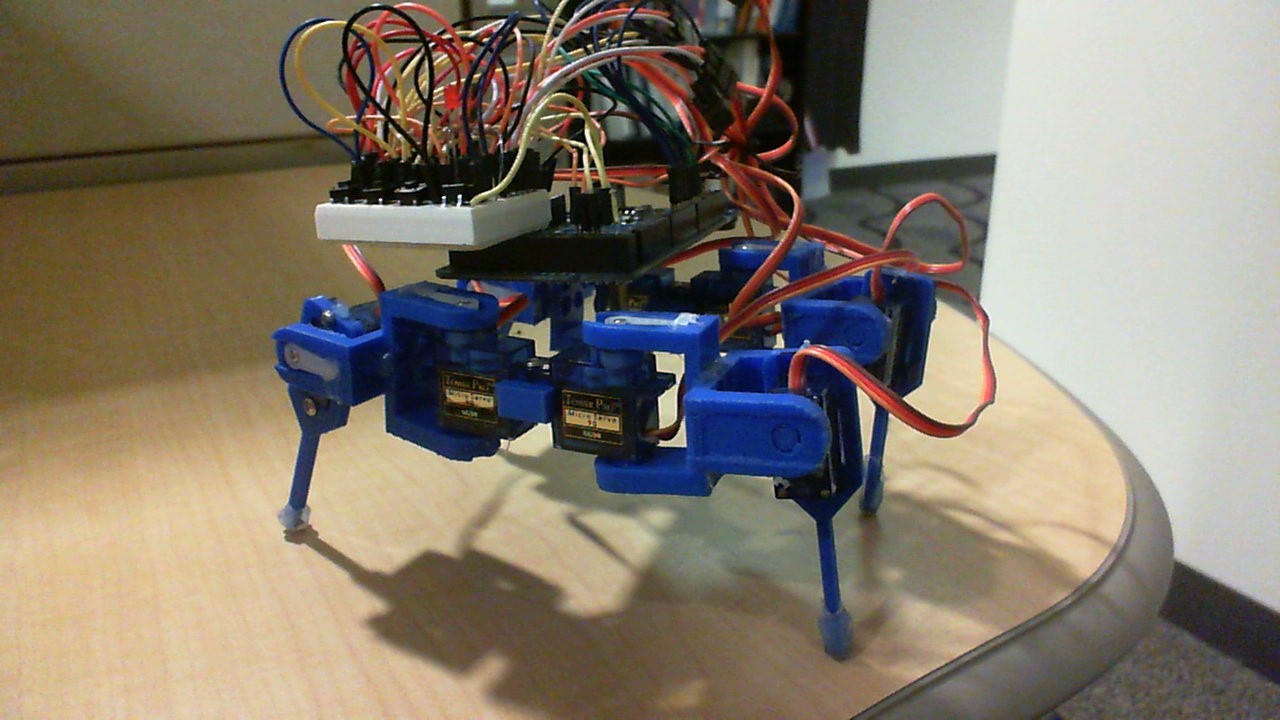
该演示使用 Arduino 板、3D 打印部件、八个伺服电机和各种其他支持硬件组件来控制机器人蜘蛛。蜘蛛的身体由 3D 打印部件制成,几个按钮控制蜘蛛的运动。
©版权声明:本文内容由互联网用户自发贡献,版权归原创作者所有,本站不拥有所有权,也不承担相关法律责任。如果您发现本站中有涉嫌抄袭的内容,欢迎发送邮件至: [email protected] 进行举报,并提供相关证据,一经查实,本站将立刻删除涉嫌侵权内容。
转载请注明出处: apollocode » 使用 Simulink 和 Stateflow 创建基于 Arduino 的机器人蜘蛛
文件列表(部分)
| 名称 | 大小 | 修改日期 |
|---|---|---|
| ArduinoRoboticSpider | 0.00 KB | 2021-07-32 |
| Arduino_Spider_Demo.slx | 29.29 KB | 2016-09-36 |
| ReadMe.txt | 1.41 KB | 2016-09-40 |
| Robotic_Spider_Schematic.PNG | 84.11 KB | 2016-09-44 |
| Robotic_Spider_SetUp.jpg | 161.92 KB | 2016-09-50 |
| Spider_3DPrint.stl | 4,733.21 KB | 2016-09-54 |
| Thumbs.db | 28.50 KB | 2016-09-38 |

发表评论 取消回复