
使用模糊逻辑和 PID 控制器的直流电机simulink仿真
预览截图
应用介绍
输入:速度误差
系统是一个非线性系统。
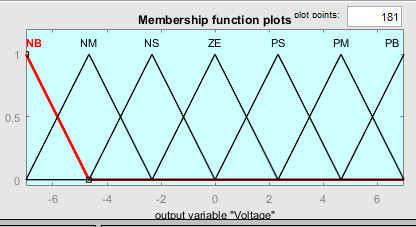
模糊化规则:Mamdani 方法
去模糊化规则:重心法
输出:速度
该simulink仿真的直流 (DC) 电机易于控制并具有非常高的性能。电机的速度可以在很宽的范围内调节。如今,经典控制技术(例如比例积分微分 - PID)非常普遍地用于速度控制。 PID 控制器需要系统的数学模型。然而,观察到经典控制技术在非线性系统的情况下没有足够的性能。因此,取而代之的是一种现代技术:模糊逻辑。模糊逻辑控制器基于基于规则知识的经验。**模糊逻辑控制器的设计需要许多设计决策,例如规则库和模糊化**。 FLC 有两个输入,其中一个是速度误差,第二个是速度误差的变化。为模糊逻辑控制器设计了49条模糊规则。重心法用于去模糊化。模糊逻辑控制器使用 mamdani 系统,该系统在后续部分采用模糊集。 PID 控制器根据试错法选择其参数。 PID和FLC在MATLAB/SIMULINK包程序仿真的帮助下进行研究。发现FLC比PID控制器更难设计,但更适合满足直流电机的非线性特性。结果表明,模糊逻辑具有最小的暂态和稳态参数,表明FLC比PID控制器更高效有效
PID仿真电路
、

PID 控制
FUZZY 仿真电路

Fuzzy Logic 控制图
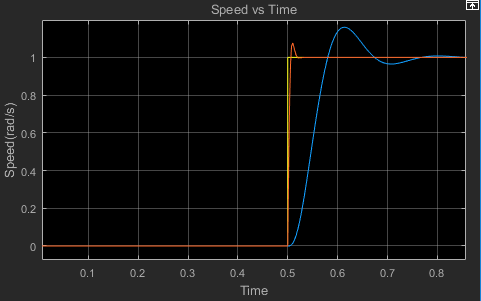
仿真结果:

PID控制和Fuzzy Logic 控制图
©版权声明:本文内容由互联网用户自发贡献,版权归原创作者所有,本站不拥有所有权,也不承担相关法律责任。如果您发现本站中有涉嫌抄袭的内容,欢迎发送邮件至: [email protected] 进行举报,并提供相关证据,一经查实,本站将立刻删除涉嫌侵权内容。
转载请注明出处: apollocode » 使用模糊逻辑和 PID 控制器的直流电机simulink仿真
文件列表(部分)
| 名称 | 大小 | 修改日期 |
|---|---|---|
| Report.pdf | 446.86 KB | 2020-10-14 |
| Images | 0.00 KB | 2020-10-14 |
| CE.PNG | 10.25 KB | 2020-10-14 |
| DCM.JPG | 19.10 KB | 2020-10-14 |
| error.PNG | 10.84 KB | 2020-10-14 |
| fuzzy.slx | 19.94 KB | 2020-10-14 |
| fuzzyControl.slx | 22.79 KB | 2020-10-14 |
| fuzzy_r.slx | 19.98 KB | 2020-10-14 |
| Fuzzy_system.PNG | 20.04 KB | 2020-10-14 |
| graph.PNG | 11.82 KB | 2020-10-14 |
| motorParam.m | 0.04 KB | 2020-10-14 |
| output.PNG | 9.56 KB | 2020-10-14 |
| PID - use.JPG | 33.25 KB | 2020-10-14 |
| PID.JPG | 33.25 KB | 2020-10-14 |
| PID.PNG | 7.18 KB | 2020-10-14 |
| powEDCMotor.slx | 22.05 KB | 2020-10-14 |

发表评论 取消回复