无刷直流电机自适应PID控制仿真
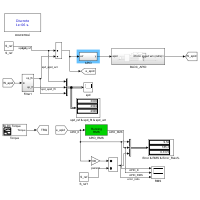
该仿真项目的主要内容是展示如何为您的电机控制系统实现自适应PID(APID)。 设计的自适应PID将参考速度与BLDC的实际速度进行比较。 然后,PID的输出连接到通用三相电桥的受控电压源供电,该三相电桥连接到BLDC电动机。
预览截图

应用介绍
该仿真项目的主要内容是展示如何为您的电机控制系统实现自适应PID(APID)。 设计的自适应PID将参考速度与BLDC的实际速度进行比较。 然后,PID的输出连接到通用三相电桥的受控电压源供电,该三相电桥连接到BLDC电动机。
在模拟的前0.2秒内,扭矩是恒定的,然后在0.2 秒将其突然更改为10N,尽管存在扭矩变化,以检查APID速度控制的能力,。 。
©版权声明:本文内容由互联网用户自发贡献,版权归原创作者所有,本站不拥有所有权,也不承担相关法律责任。如果您发现本站中有涉嫌抄袭的内容,欢迎发送邮件至: [email protected] 进行举报,并提供相关证据,一经查实,本站将立刻删除涉嫌侵权内容。
转载请注明出处: apollocode » 无刷直流电机自适应PID控制仿真
文件列表(部分)
| 名称 | 大小 | 修改日期 |
|---|---|---|
| Adapive PID Controller for BLDC Speed Control.slx | 40.55 KB | 2019-07-56 |
| license.txt | 1.45 KB | 2019-07-56 |

发表评论 取消回复